 علوم القطيف مقالات علمية في شتى المجالات العلمية
علوم القطيف مقالات علمية في شتى المجالات العلمية
Soft robotic hand ‘sees’ around corners to achieve human-like touch By: Ingrid Fadelli, edited
(Gaby Clark, reviewed by Robert Egan – بقلم: إنغريد فاديلي، تصحيح: غابي كلارك، مراجعة: روبرت إيغان)
ملخص: تستخدم يد روبوتية مرنة جديدة، تُدعى فليكسي راي، بنية مرنة ونظامًا بصريًا داخليًا للحفاظ على استشعار لمسي عالي الدقة حتى أثناء التشوه الكبير. يُمكّن هذا التصميم الذراع من اكتشاف القوة والموقع والملمس ودرجة الحرارة والإحساس بالوضع عبر مساحة تلامس واسعة، مما يُحسّن التعامل مع الأجسام الدقيقة وغير المنتظمة مع تعزيز السلامة والقدرة على التكيف.
( المقالة المترجمة )
لإنجاز الأعمال المنزلية، وتجميع المنتجات، وغيرها من المهام اليدوية بكفاءة، ينبغي أن تكون الروبوتات قادرة على تكييف استراتيجياتها في التعامل مع الأشياء بناءً على طبيعة الأشياء التي تتعامل معها، تمامًا كما يستفيد البشر من المعلومات التي يحصلون عليها عبر حاسة اللمس. فبينما يحصل البشر على المعلومات اللمسية عبر الأعصاب في جلدهم وعضلاتهم، تعتمد الروبوتات على أجهزة استشعار، وهي أجهزة تستشعر محيطها وتلتقط إشارات فيزيائية محددة.
وتعتمد معظم الأيدي والأذرع الروبوتية المطورة حتى الآن على أجهزة استشعار بصرية-لمسية، وهي أنظمة تستخدم كاميرات صغيرة لالتقاط الصور، بالإضافة إلى رصد تشوهات الأسطح الناتجة عن ملامسة أشياء محددة.
ويُعدّ أحد أبرز عيوب هذه المستشعرات هو ضرورة تصنيعها من مواد صلبة لضمان التقاط الكاميرات صورًا عالية الجودة. وهذا يُقلل من مرونة الروبوتات التي تعتمد على هذه المستشعرات، مما يُصعّب عليها التعامل مع الأشياء الهشة وغير المنتظمة الشكل.
وقد قدّم باحثون في جامعة تشجيانغ الصينية مؤخرًا “فليكسي راي”، وهي يد روبوتية جديدة قادرة على التغلب على هذا القيد من خلال الجمع بين بنية ميكانيكية مبتكرة وخوارزميات التعلم العميق. وتعتمد اليد الروبوتية، التي عُرضت في ورقة بحثية نُشرت في مجلة “نيتشر كوميونيكيشنز” (Nature Communications) ، على بنية مرنة تنحني تلقائيًا إلى الداخل عند الضغط عليها، مُنتجةً أنماط تشوه تُحللها خوارزمية التعلم العميق.
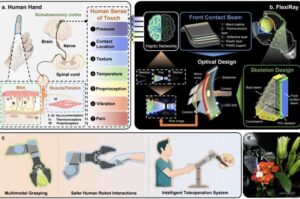
وصرح البروفيسور هويكسو دونغ، المؤلف الرئيسي للورقة البحثية، لموقع “تيك اكسبلور” (Tech Xplore): “استُلهم هذا العمل من القدرات المذهلة لليد البشرية، التي تجمع بين جلد ناعم ومرن ونظام حسي معقد قادر على استشعار الضغط والملمس ودرجة الحرارة في آنٍ واحد”.
وأضاف: “مع أن الأنظمة الروبوتية المرنة قد حققت تقدمًا كبيرًا في المرونة الهيكلية (السلامة وقابلية التكيف)، إلا أن دمج الاستشعار عالي الدقة في هذه الأجسام المرنة لا يزال يُمثل تحديًا كبيرًا. وكان هدفنا الرئيسي هو حل مشكلة ‘النقاط العمياء‘ في أجهزة الاستشعار المرنة”.
شاهد التفاعلات بين الإنسان والروبوت على منصة يوتيوب: https://youtu.be/JzxiGRLKAj8 . المصدر:مجلة “نيتشر كوميونيكيشنز” (2025) – الرابط: DOI: 10.1038/s41467-025-67148-y
![]()
“فليكسي راي”: ذراع روبوتية مستوحاة من الإنسان
أثناء مراجعة البروفيسور دونغ وزملائه للأبحاث السابقة في مجال الروبوتات، لاحظوا أن معظم أجهزة الاستشعار البصرية اللمسية المتوفرة تفتقر إلى المرونة الكافية، إذ أن التشوهات السطحية الكبيرة قد تؤثر سلبًا على مجال رؤية الكاميرات المدمجة. لذلك، شرعوا في تصميم ذراع بديلة قادرة على استشعار الأجسام بدقة عالية، حتى عند تعرضها لتشوه أو التواء أو انحناء كبير حولها.
ويوضح البروفيسور دونغ قائلاً: “فليكسي راي عبارة عن إصبع روبوتية مرنة ‘ترى’ ما تلمسه. وهي مبنية على بنية مستوحاة من الطبيعة تُسمى تأثير شعاع الزعنفة، مما يسمح لها بالالتفاف حول الأجسام بسلاسة مثل زعنفة السمكة. وتعمل باستخدام كاميرا داخلية ونظام بصري فريد متعدد المرايا”.
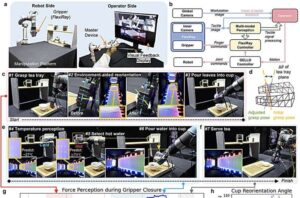
وعادةً، عندما ينحني إصبع روبوتية مرنة، فإنه يحجب مجال رؤية الكاميرات المدمجة بداخلها. ومن ناحية أخرى، يتميز جهاز الإمساك الخاص بالفريق ببنية بصرية داخلية فريدة تسمح له بإعادة توجيه مجال رؤية الكاميرا ديناميكيًا استجابةً للتشوه السلبي لأصابعه.
ويقول البروفيسور دونغ: “ببساطة، يدفع التشوه الميكانيكي للأصابع النظام البصري إلى ‘النظر حول‘ الزوايا. وهذا يسمح لـ ‘فيليكس راي‘ بالالتفاف حول الأجسام غير المنتظمة (مثل زعنفة السمكة) مع الحفاظ على رؤية مستمرة وغير محجوبة لسطح التلامس”.
ويضيف: “يحوّل هذا العائق الهيكلي من عائق إلى آلية وظيفية للاستشعار الشامل. يتكون غلافها الخارجي من وسادة متعددة الطبقات تحتوي على مواد متغيرة اللون بالحرارة ومواد عاكسة”. وتكمن الميزة الأساسية لتقنية “فليكس راي” في قدرتها على جمع المعلومات البصرية واللمسية بدقة عالية حتى مع استخدام مواد مرنة للغاية. فباستخدام كاميرا واحدة، يستطيع الذراع الروبوتي تحديد القوة المطبقة وشكله وموضع تلامسه مع الجسم بدقة متناهية، بالإضافة إلى ملمس الجسم ودرجة حرارته.
ويقول البروفيسور دونغ: “في الاختبارات الأولية، حققت يدنا الروبوتية تغطية استشعار فعالة تزيد عن 90% حتى أثناء التشوهات الكبيرة. ويُعدّ أبرز إنجازاتنا هو التحول الجذري من مفهوم ‘تجنب التشوه‘ إلى مفهوم ‘الاستفادة من التشوه‘. لقد أثبتنا أن الإصبع الروبوتي قادر على تحقيق التشوهات السلبية الكبيرة اللازمة للإمساك الآمن والمرن دون المساس بالإدراك الحسي”.
تمكين الروبوتات من التعامل مع الأشياء بموثوقية أكبر
حققت اليد الروبوتية المُستحدثة نتائج واعدة للغاية حتى الآن، مما يُبرز إمكاناتها في التعامل مع الأشياء والأدوات الدقيقة التي غالبًا ما تُعاني الروبوتات من ضعف في التعامل معها. ويمكن تطوير النموذج الأولي للذراع قريبًا، أو دمجه مع مكونات أخرى، لإنشاء أنظمة مُصممة خصيصًا لتطبيقات عملية مُحددة.
ويقول البروفيسور دونغ: “على عكس المستشعرات الصلبة التي لا تستشعر سوى مساحة صغيرة ومسطحة، يُحقق ‘فليكس راي‘ منطقة استشعار فعّالة واسعة النطاق لأنه يتكيف مع شكل الجسم”.
ويضيف: “من خلال تحويل التشوهات الهيكلية الكبيرة إلى إشارات بصرية صحيحة، نجحنا في محاكاة خمس حواس بشرية (القوة، والموقع، والملمس، ودرجة الحرارة، والإحساس بالوضع) في جسم مرن واحد قوي”.
وفي المستقبل، قد يُثبت ‘فليكس راي‘ فائدته في التعامل مع مختلف الأشياء العملية، بدءًا من المنتجات الزراعية الدقيقة وصولًا إلى العبوات غير المنتظمة. ولأنه مصنوع من مواد أكثر ليونة من العديد من الأيدي الروبوتية التي طُرحت سابقًا، فقد يكون أكثر أمانًا عند استخدامه بالقرب من البشر أو الأشياء القابلة للتلف بسهولة.
وأضاف البروفيسور دونغ: “يعمل جهاز ‘فليكس راي‘ حاليًا كأداة إمساك، لكن أبحاثنا المستقبلية تهدف إلى تطوير هذه التقنية لتشمل أيادي روبوتية متعددة الأصابع بالكامل، ما يُمكّن من إجراء عمليات مناورة أكثر تعقيدًا”.
وتابع: “كما نخطط لدمج هذا الجهاز مع أُطر التعلم بالتقليد. سيُمكّن هذا الروبوتات من تعلم البراعة والسلامة مباشرةً من خلال محاكاة البشر، باستخدام البيانات اللمسية والحرارية الغنية التي يوفرها “فليكس راي” لفهم العالم المادي بشكل أفضل”.
وللمزيد من المعلومات، يمكن قراءة الورقة البحثية: “يد روبوتية مرنة تستغل التشوهات الكبيرة لتوفير إدراك لمسي متعدد الوسائط يشبه إدراك الإنسان”، تأليف يانزهي وانغ وآخرون، المنشورة في مجلة “نيتشر كوميونيكيشنز” (2025) – الرابط: DOI: 10.1038/s41467-025-67148-y.
*تمت الترجمة بتصرف
المصدر:
https://techxplore.com/news/2026-01-soft-robotic-corners-human.html
